AGV的用法
AGV的用法
一、设置AGV的安全距离。
打开AGV小车,选择控件,设置距离为任意值,下图为2m,创建控制方法。输入以下代码。

1 | param distanceIsBelowLimit: boolean |
代码解释:
设定两个变量mu1和mu2,mu1是当前的AGV小车,mu2是与当前小车相邻的前一个小车。如果distanceIsBelowLimit 是true的话。那么mu2的速度变为0,否则的话,mu2的速度等于mu1的速度。
官方文档对distanceIsBelowLimit 的解释如下:
1 | The parameter DistanceIsBelowLimit of data type boolean is true when the distance becomes too small. It is false when the distance becomes too great. |
及示例代码:
1 | -- ? designates the transporter with the control |
二、设置AGV的分流
对AGV设置控制策略,当满足条件时,进行分流行走。
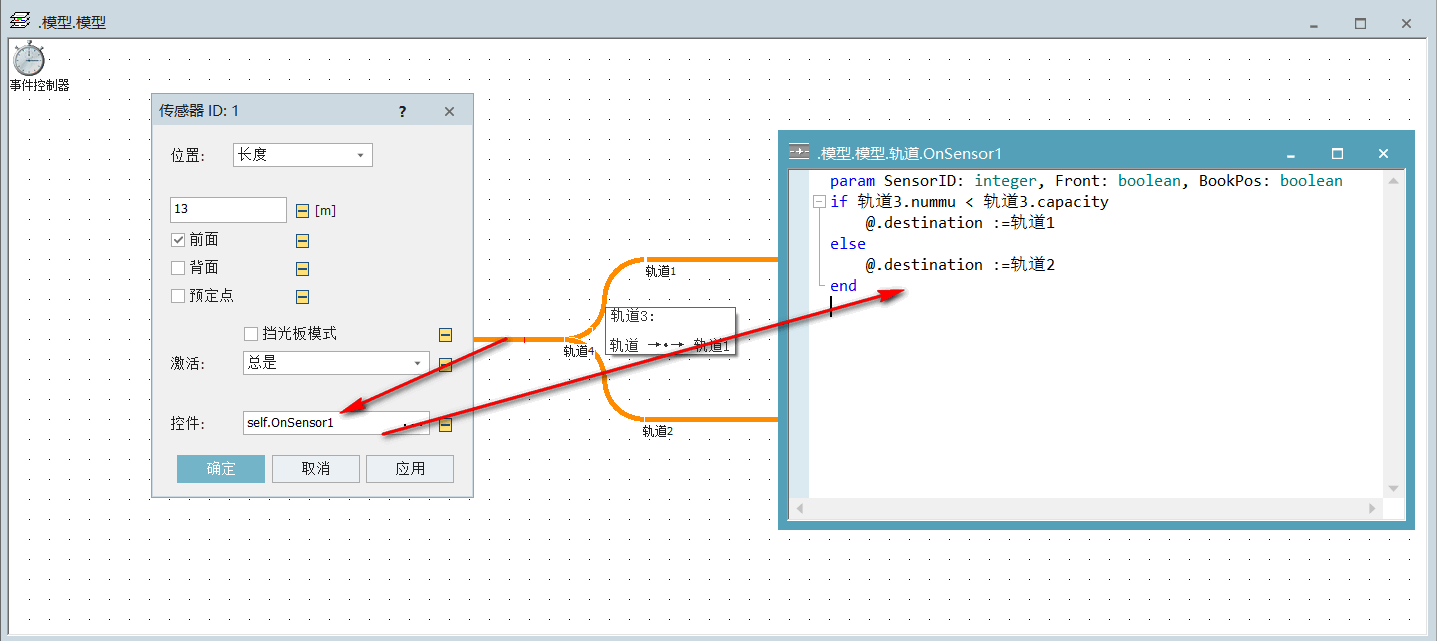
1 | param SensorID: integer, Front: boolean, BookPos: boolean |
代码解释:
如果轨道3上的小车数量小于其容量,则小车目的地设为轨道1。
如果轨道3上的小车数量大于等于其容量,则小车目的地设为轨道2。
三、AGV变换速度
使用代码对AGV的速度进行变换。加入原始速度为1m/s。
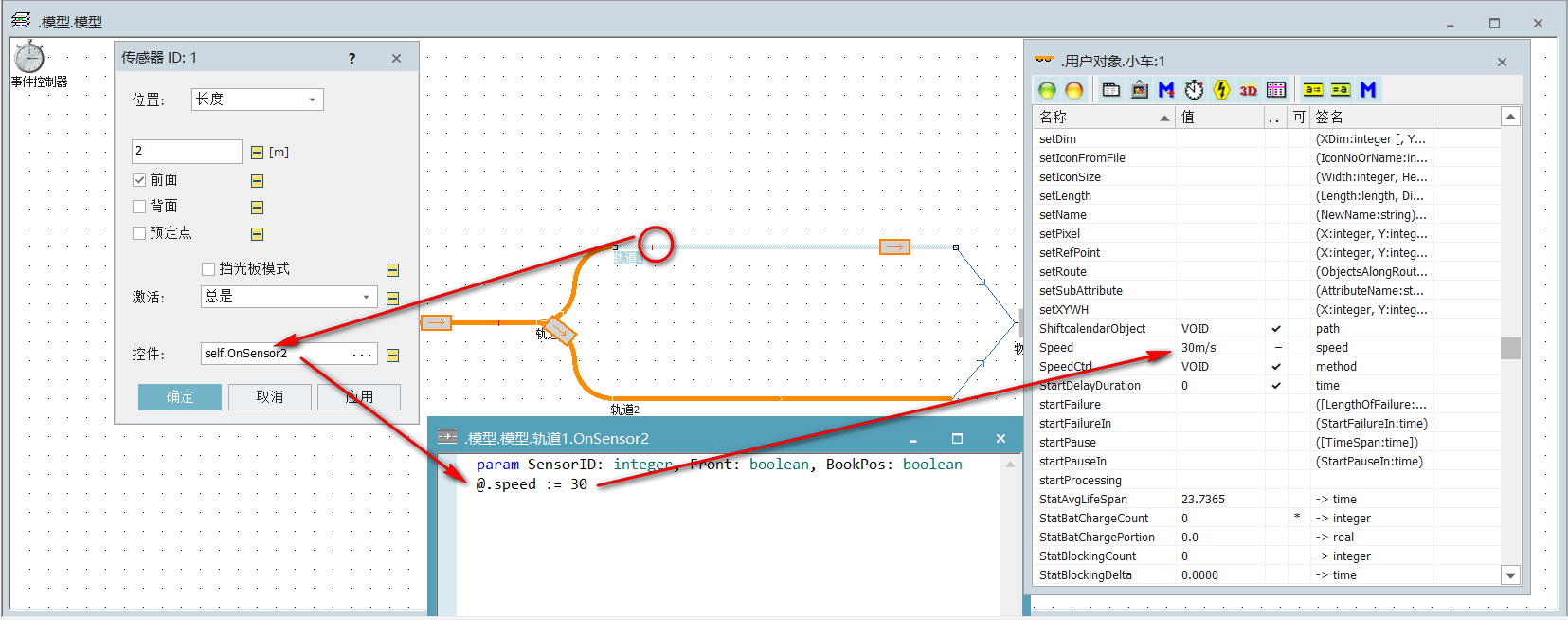
在轨道上增加传感器,输入以下代码:
1 | @.speed := 30 |
当AGV经过传感器时,既可修改AGV的运行速度。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 记录我自己!
评论